
Portfolio Details
Generalist Expert of Electrical Engineering, Mechatronics, Automation and Control Systems, PLC, AIoT
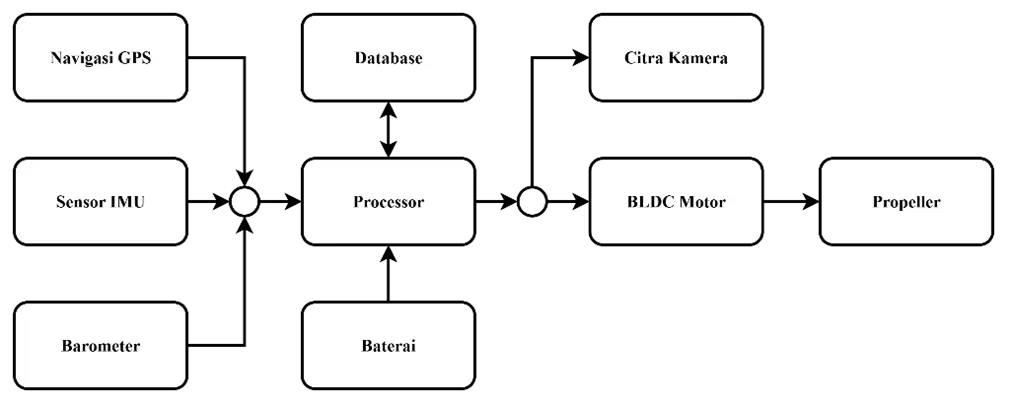
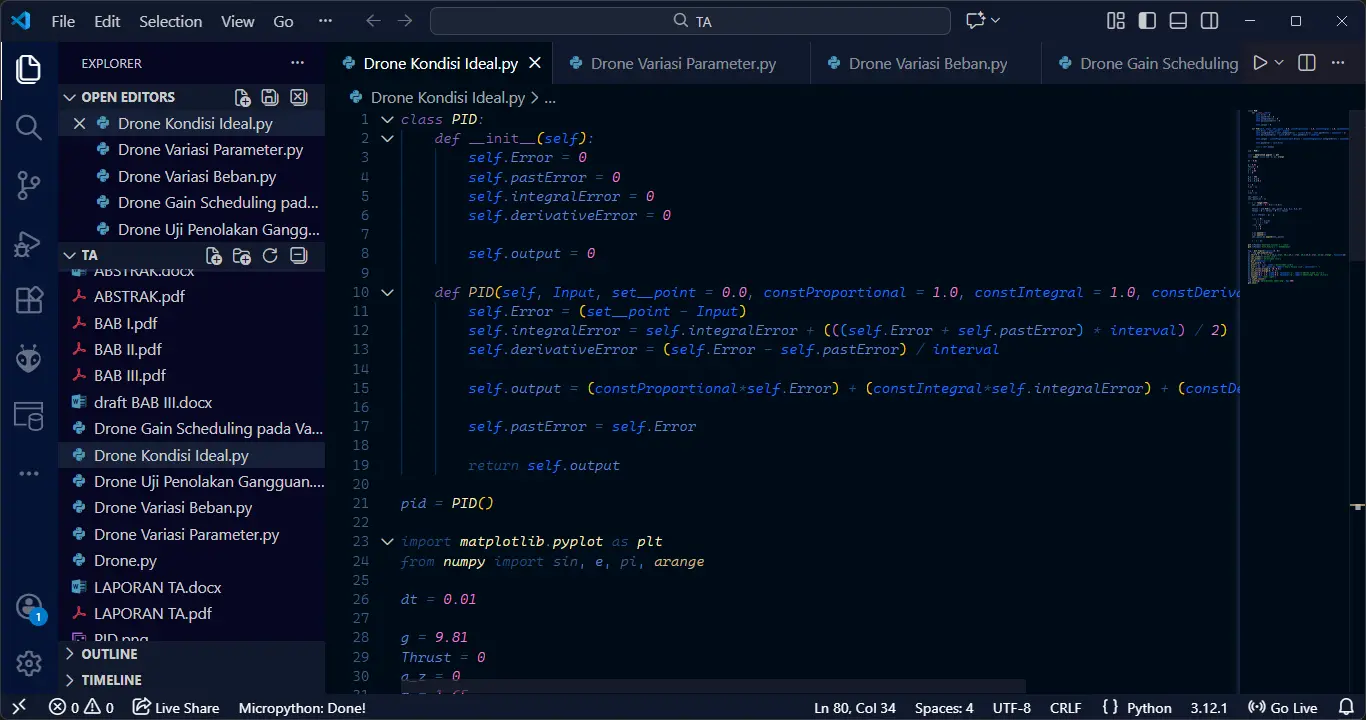
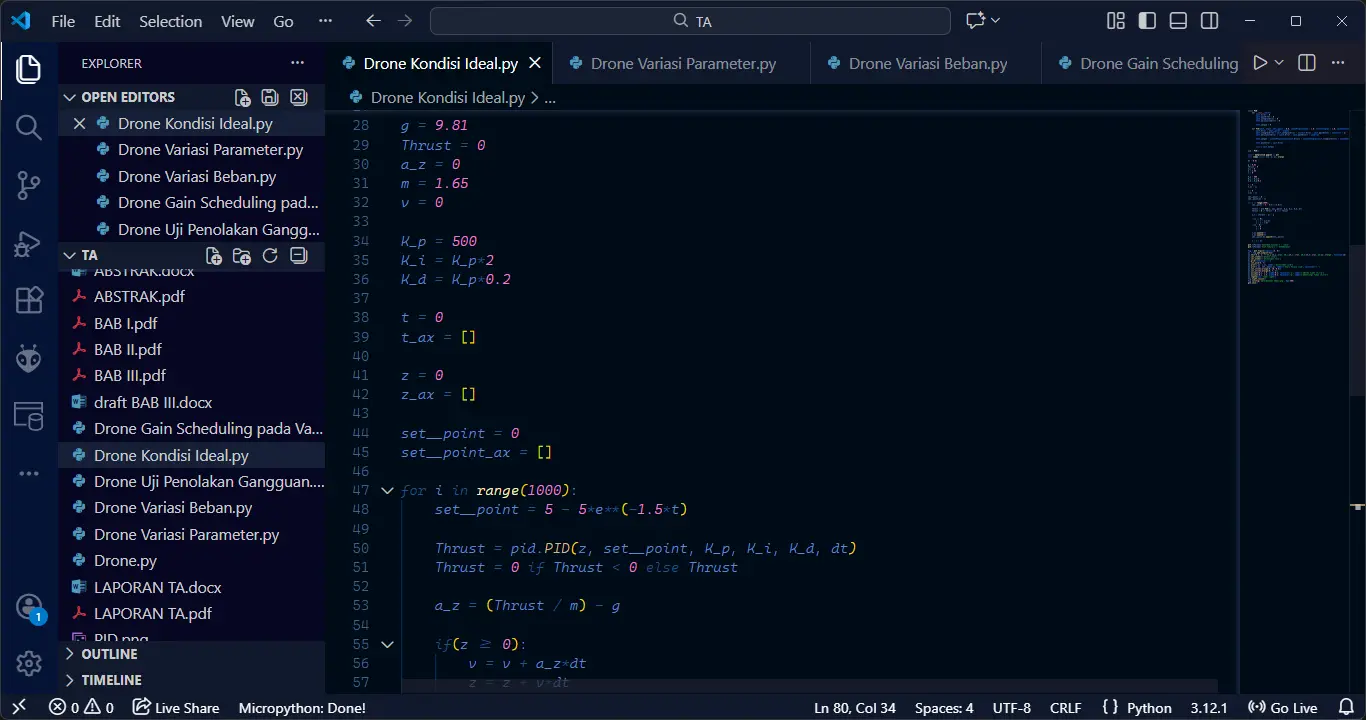
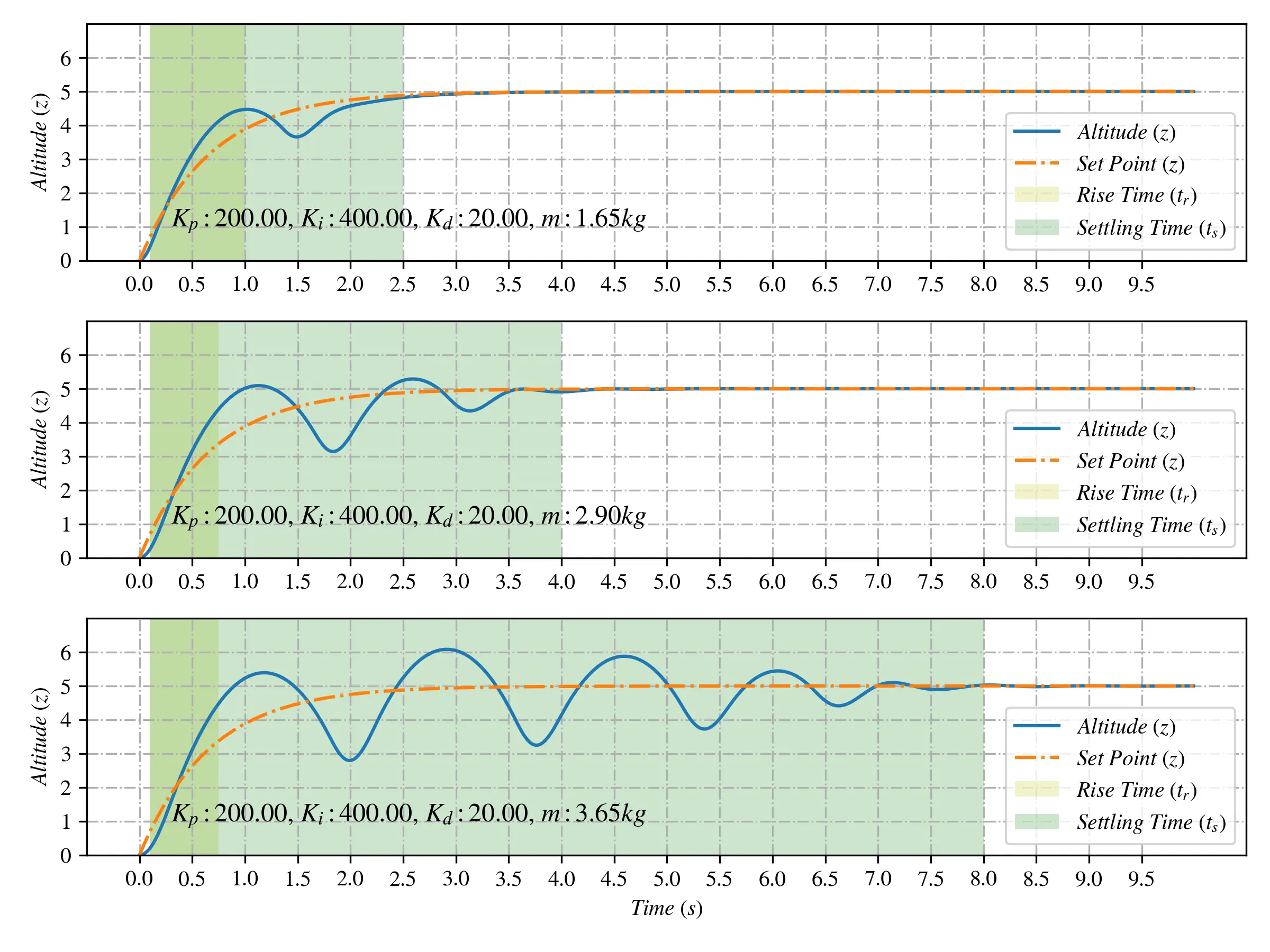
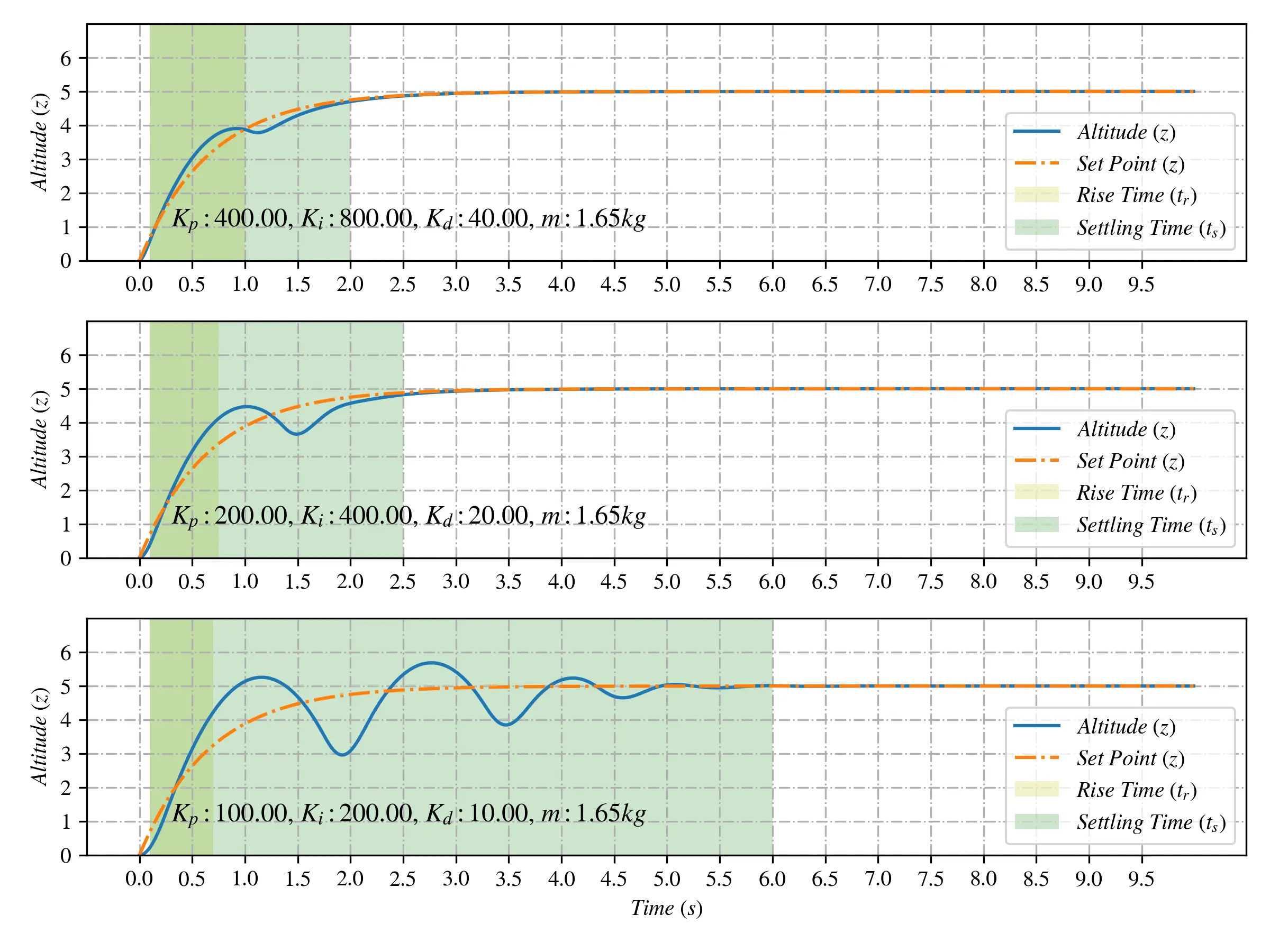
Optimasi Sistem Kendali PID Adaptif Pada Drone Quadcopter Untuk Stabilisasi Altitude dan Attitude saat Bermanuver Secara Otonom
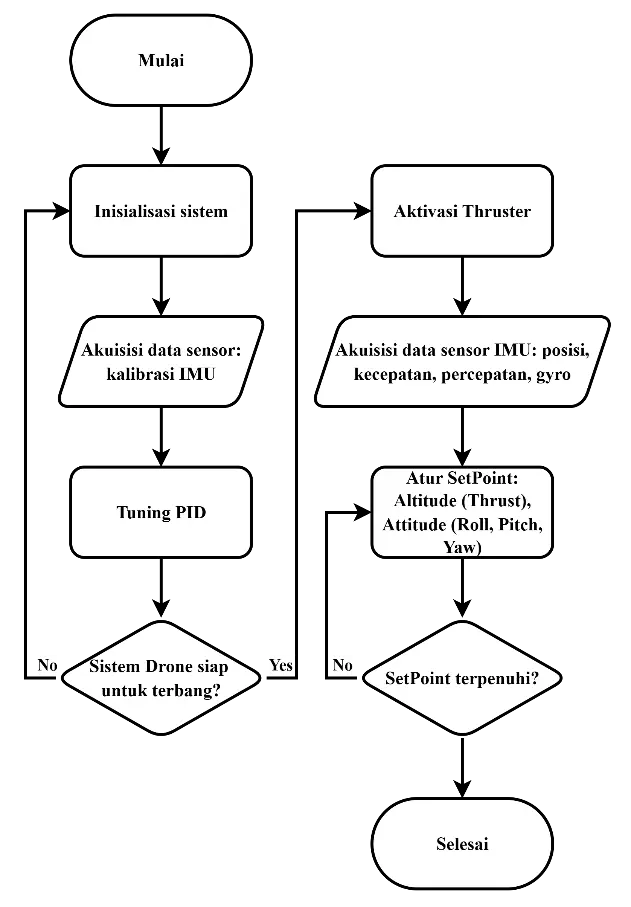
Project ini bertujuan untuk mensimulasikan Sistem Kendali PID Adaptif pada Drone Quadcopter untuk stabilisasi Altitude dan Attitude saat bermanuver secara Otonom.
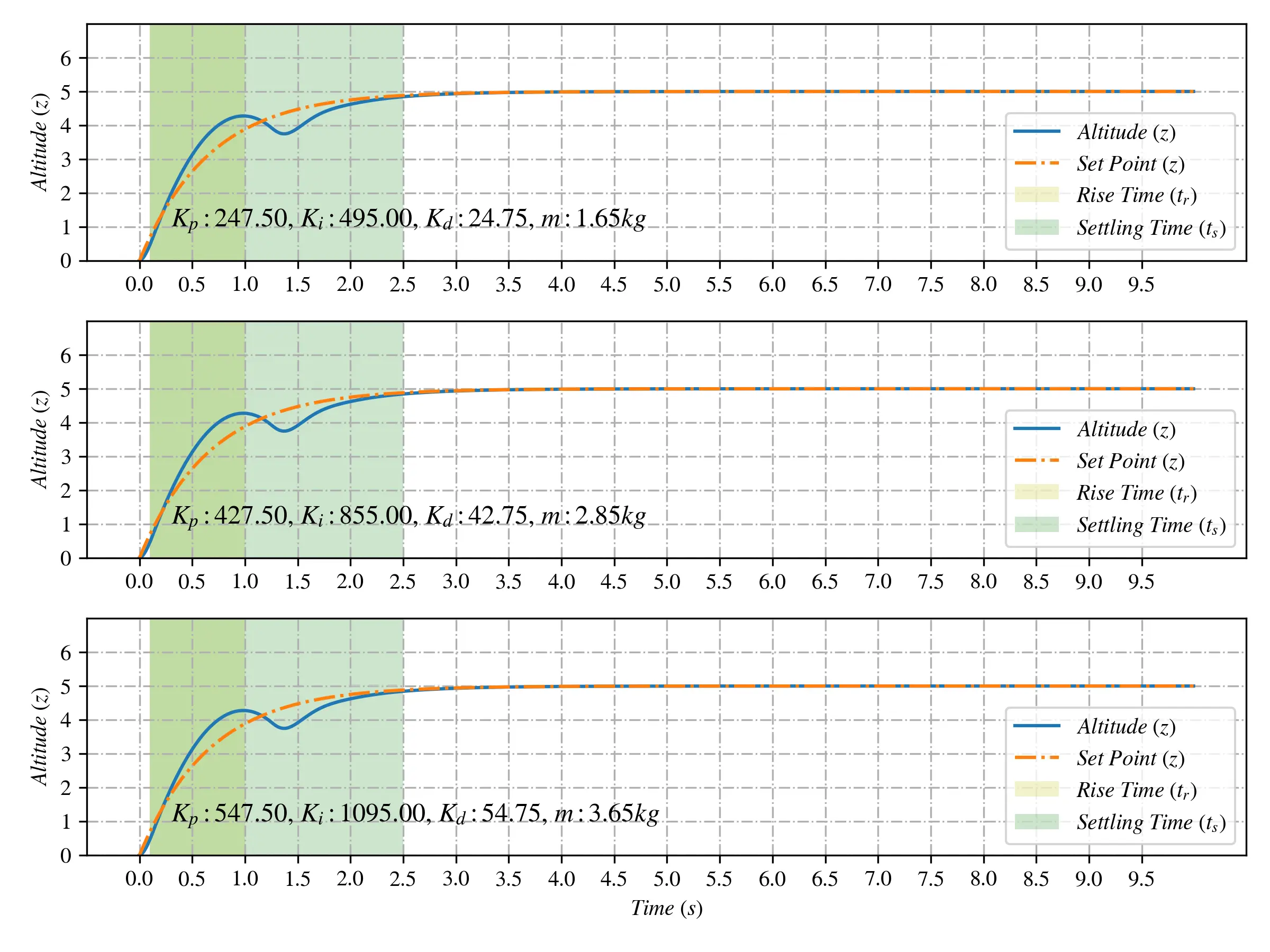
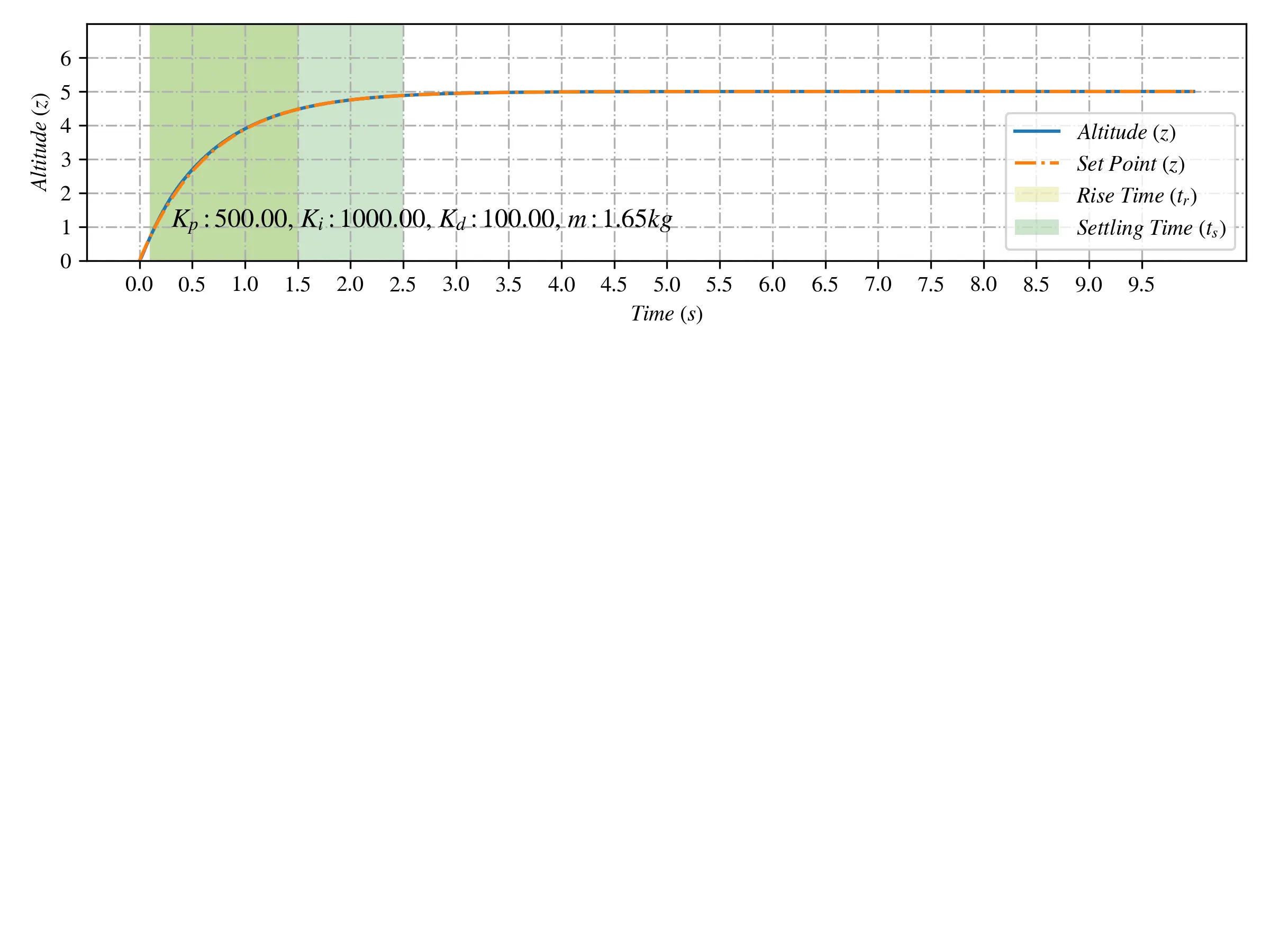
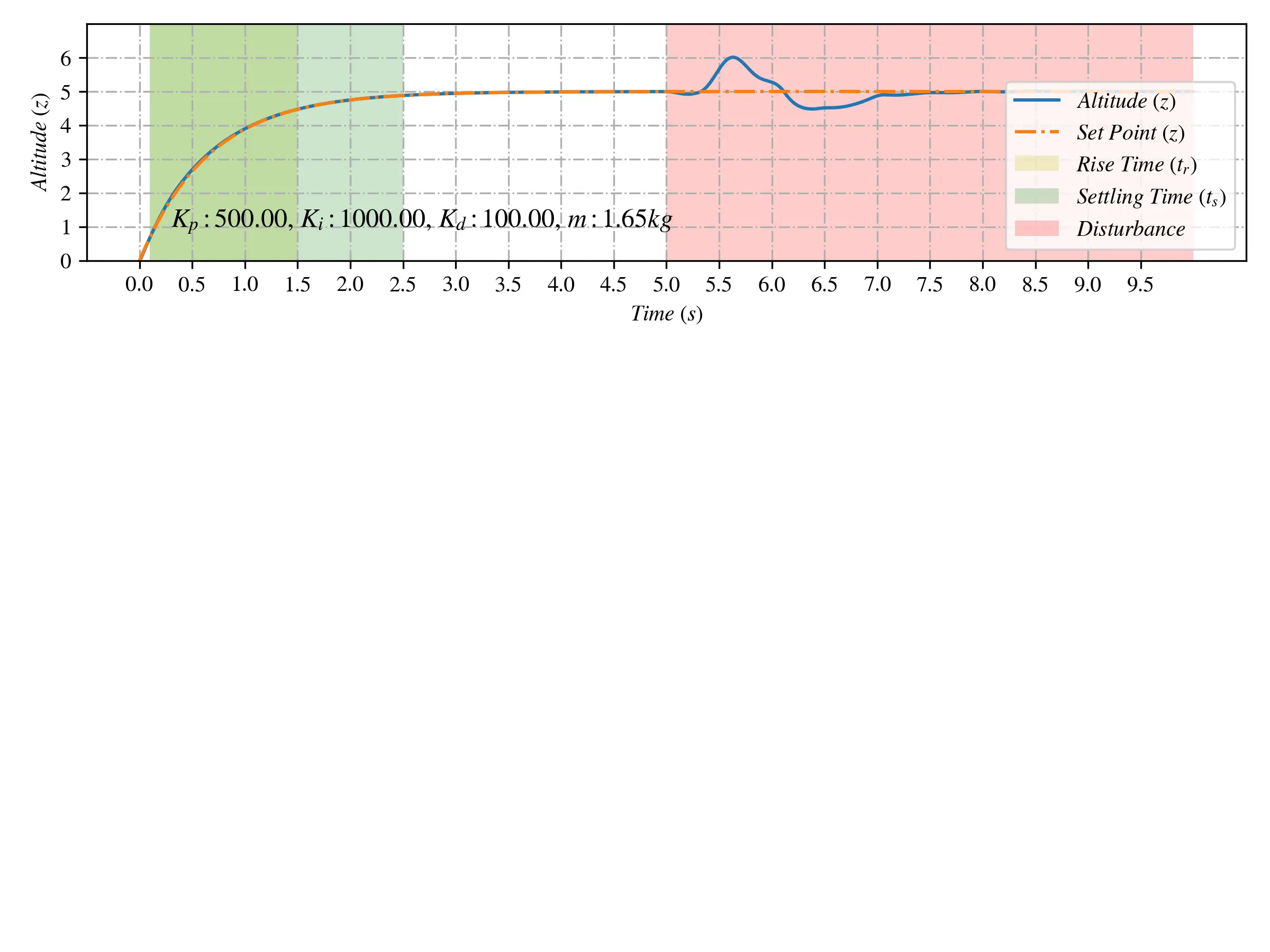
Fokus utama project adalah Control System, PID Control dan Adaptive Gain scheduling. Saya bertanggungjawab dalam perancangan, analisis dan simulasi gerak drone quadcopter dengan model frame drone, PID controler, tuning dan algoritma Gain Scheduling yang sudah ditetapkan. Hasil dari project ini adalah drone quadcopter dapat menjaga kestabilan Altitude pada kondisi ideal dan optimal, sementara pada variasi beban dan gangguan eksternal, drone quadcopter dapat beradaptasi dan melakukan recovery dengan cepat, menunjukkan performa sistem yang baik dalam bermanuver.
Key Features
- Python (Programming Language)
- Control Systems
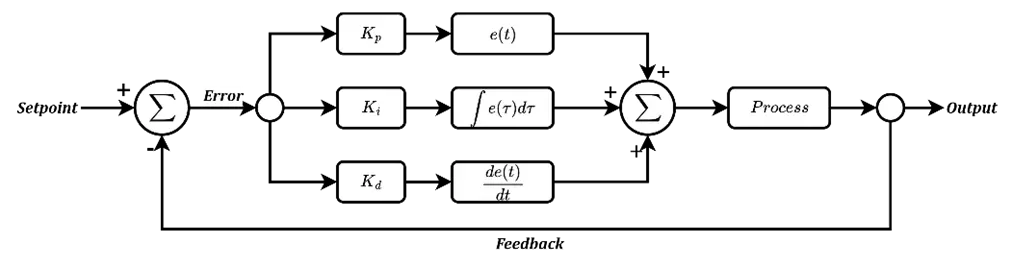
- Proportional-Integral-Derivative (PID)
- Mathematical Modeling
- Numerical Simulation